
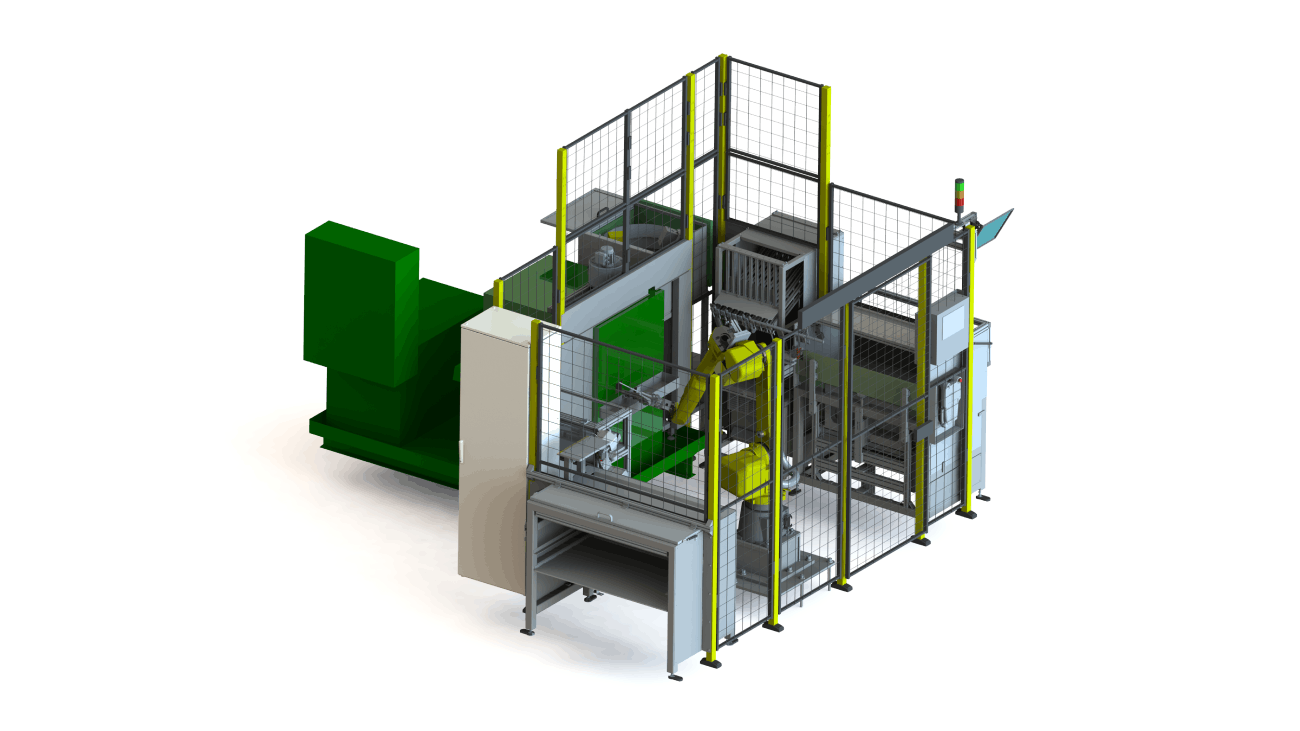
Toto zařízení pomocí šestiosého robota manipuluje s trubkami různých tvarů, průměrů a délek mezi jednotlivými operacemi výrobního postupu. Robot si odebírá trubky dle programu z jednoho ze dvou zásobníků, který před spuštěním výroby obsluha naplní větším počtem trubek. Po spuštění výroby zvolené trubky obsluha pracoviště opouští a průběžně jen přichází kontrolovat průběh výroby. Pracoviště pracuje v taktu 17 vteřin, kdy trubka projde šesti pozicemi.
Jednou z operací výrobního postupu je osazení konce trubky tvarovou přírubou a následné natváření konce trubky. Příruby jsou automaticky podávány z kruhového vibračního zásobníku, který je uzpůsoben pro podávání devíti typů přírub. Správná orientace je kontrolována kamerovým senzorem a nesprávně orientované příruby jsou automaticky shazovány.
Velkým přínosem pro zákazníka je tvorba nových receptů, kdy po zadání tří parametrů o nové trubce, software vypočte nové trajektorie pro pohyb robota. Novinkou je způsob odjehlování konců trubek po tváření, kdy je dosaženo požadovaného výsledu po stránce kvalitativní.
Tento projekt byl realizován pro společnost Hanon Systems Autopal s.r.o.
{kind=link}
{kind=link}
{kind=link}
{kind=link}